The duty on self-starting synchronous
motors and condensors is severe, as there are large induction
currents in the starting cage winding once the stator winding is
energized (see Fig. 5.6).
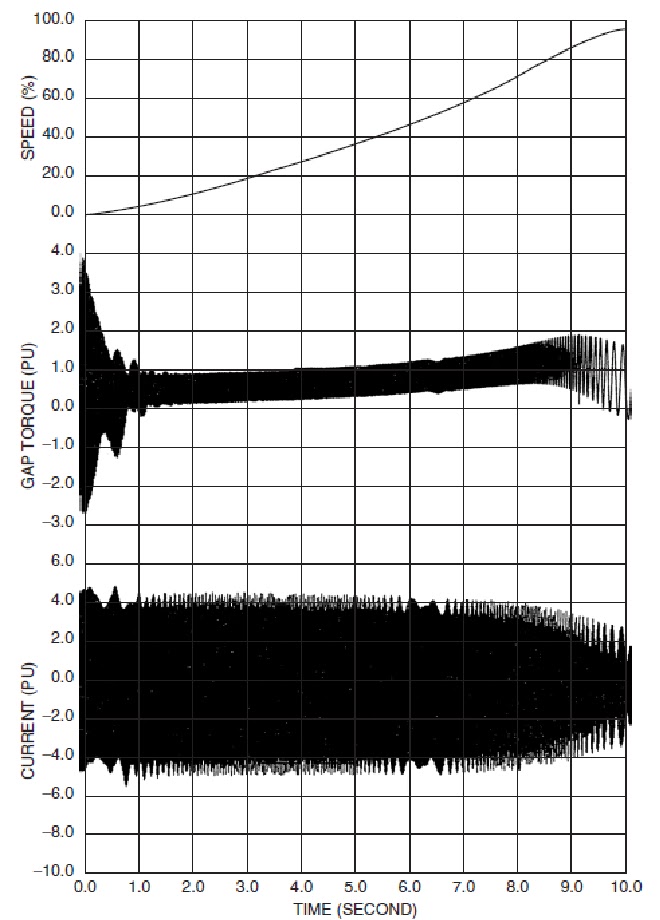
FIGURE 5.6 Synchronous motor and
condensor starting.
These persist as the motor comes up to
speed, similar to but not identical to starting an induction motor.
Similarities exist to the extent that extremely high torque impacts
the rotor initially and decays rapidly to an average value,
increasing with time.
Different from the induction motor is
the presence of a large oscillating torque. The oscillating torque
decreases in frequency as the rotor speed increases.
This oscillating frequency is caused by
the saliency effect of the protruding poles on the rotor.
Meanwhile, the stator current remains
constant until 80% speed is reached. The oscillating torque at
decaying frequency may excite train torsional natural frequencies
during acceleration, a serious train design consideration.
An anomaly occurs at half speed as a
dip in torque and current due to the coincidence of line frequency
torque with oscillating torque frequency. Once the rotor is close to
rated speed, excitation is applied to the field coils and the rotor
pulls into synchronism with the rotating electromagnetic poles.
At this point, stable steady-state
operation begins.
Increasingly, variable frequency power
is supplied to synchronous machinery primarily to deliver the optimum
motor speed to meet load requirements, improving the process
efficiency. It can also be used for soft-starting the synchronous
motor or condenser.
Special design and control are employed
to avert problems imposed, such as excitation of train torsional
natural frequencies and extra heating from harmonics of the supply
power.

No comments:
Post a Comment